Sankyo Seisakusho 자동차용 모터 코어 전적 금형 구동 장치 Servo-dex EVR1 시리즈
페이지 정보

본문

배리어스는 프레스 가공 업계에서의 재료 이송에 관한 다양한 요구 해결을 주제로 당사가 자랑하는 최신 캠 기술을 응용하여 완성된 고성능 고속 프레스 이송 장치 및 그 관련 제품 시스템의 총칭 입니다.
배리어스는 구동부에 롤러 기어 캠 기구를 채용한 메카니컬 피더와 서보 모터를 채용한 서보 피더로 대별됩니다. 메카니컬 피더의 캠, 서보 피더의 모터 제어에는 당사 독자적으로 개발한 운동 곡선을 사용하여 세계에서 가장 빠른 이송 장치를 실현하고 있습니다. 구체적으로는, 메카니컬 피더 3600spm, 서보 피더 1000spm라는 세계 최고 속도의 이송을 실현하고, 게다가 그 때의 매회의 이송량 편차는 ±0.01mm 이하와 발군의 이송 정밀도를 자랑합니다.
메카니컬 피더의 구동에는 일반적인 타이밍 벨트 구동(SCT 드라이브)과 프레스와 동기 가능한 당사 오리지널 동기 컨트롤러를 사용한 서보 구동(VSD 드라이브)을 선택할 수 있습니다.
산쿄 제작소에서는 이러한 배리어스 기술을 구사하여 항상 '최고의 재료 FEED'를 목표로 고객과의 양방향 커뮤니케이션에서 요구하는 목적, 사양, 조건 등에 부응하기 위해 연구 개발을 추진하고 있습니다.
지금 이 순간도 전세계 1만대 이상의 VARIAX가 밤낮을 불문하고, 발군의 생산성·신뢰성으로 다양한 재료를 계속 보내고 있습니다.
배리어스는 구동부에 롤러 기어 캠 기구를 채용한 메카니컬 피더와 서보 모터를 채용한 서보 피더로 대별됩니다. 메카니컬 피더의 캠, 서보 피더의 모터 제어에는 당사 독자적으로 개발한 운동 곡선을 사용하여 세계에서 가장 빠른 이송 장치를 실현하고 있습니다. 구체적으로는, 메카니컬 피더 3600spm, 서보 피더 1000spm라는 세계 최고 속도의 이송을 실현하고, 게다가 그 때의 매회의 이송량 편차는 ±0.01mm 이하와 발군의 이송 정밀도를 자랑합니다.
메카니컬 피더의 구동에는 일반적인 타이밍 벨트 구동(SCT 드라이브)과 프레스와 동기 가능한 당사 오리지널 동기 컨트롤러를 사용한 서보 구동(VSD 드라이브)을 선택할 수 있습니다.
또한이 동기화 컨트롤러를 사용하여 다양한 프레스 주변 장치
■루프 컨트롤러 ■전적 유닛 ■머티리얼 커터 ■언코이라
등도 라인업하고 있어, 동기 시스템으로서 각 제품을 연결하는 것으로 프레스 시스템의 FMS화나 NC화를 실현 가능하게 했습니다.산쿄 제작소에서는 이러한 배리어스 기술을 구사하여 항상 '최고의 재료 FEED'를 목표로 고객과의 양방향 커뮤니케이션에서 요구하는 목적, 사양, 조건 등에 부응하기 위해 연구 개발을 추진하고 있습니다.
지금 이 순간도 전세계 1만대 이상의 VARIAX가 밤낮을 불문하고, 발군의 생산성·신뢰성으로 다양한 재료를 계속 보내고 있습니다.



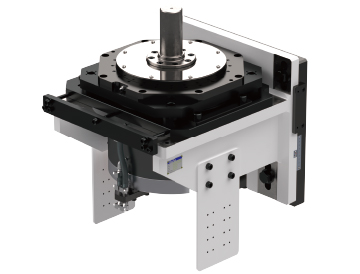
기계식 전적 장치에서 진화한 서보식 전적 장치는 전적
각도의 자유로운 설정이 가능
각도의 자유로운 설정이 가능
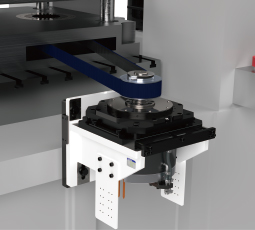
Servo-dex EVR1 시리즈는 하이브리트 자동차, PHEV 자동차 및 EV 차량용 모터 코어 제조 프레스 라인에 이상적인 모터 코어 전적 금형 구동 장치입니다. 고성능 서보 모터를 직결함으로써 전적 적층을 고속·고토크 구동하는 동시에 전적 각도를 자유롭게 설정할 수 있습니다. 서보 모터와 캠 곡선의 융합에 의해 고속성 및 다양한 전적이 가능하여 고품질의 모터 코어의 생산성 향상에 공헌합니다.
EVR1 시리즈 기종(4기종)
| EVR1-230R | EVR1-310R | EVR1-230U | EVR1-310U |
・고성능 모터에 의한 세계 톱 클래스의 성능
・임의의 전적 각도 설정, 모터 코어의 스큐 가공에도 대응
・통신 기능에 의해 떨어진 장소에서 상황 확인이 가능
・고정밀도 위치결정에 의해 금형 수명을 향상
・서보 피더와 서보덱스(전적 장치)의 조합으로 모터 코어 라인의 최적화를 실현
EVR1 시리즈 일반 사양
| 일반사양 | 고출력 사양 | ||||
| 항목 | 단위 | EVR1-230R | EVR1-310R | EVR1-230U | EVR1-310U |
| 정격 토크 | N·m | 173 | 238 | 453 | 792 |
| 최대 토크 | N·m | 538 | 1300 | 643 | 1300 |
| 정격 회전수 | rpm | 798 | 777 | 823 | 777 |
| 부하 관성 기준(max) ※2 | kg· m2 | 0.5 | 1.5 | 0.5 | 1.5 |
| 전적 각도 | deg | 선택 | |||
| 할당 각도 | deg | 선택 | |||
| 허용 축방향 하중 ※3 | N | 100 | |||
| 허용 레이디얼 하중 ※4 ※5 | N | 2,000 | 4,400 | 2,000 | 4,400 |
| 모터 용량 | Kw | 15 | 19 | 39 | 65 |
| 사용공기압력 ※6 | Mpa | 0.4~0.5 | - | ||
| 필요 냉각 에어량 ※7 | L/min | 220 | - | ||
| 필요한 최대 냉각 용량 | Kw | - | 7.2 | 6.58 | |
| 필요 냉각수량 | L/min | - | 12.1 | 19.5 | |
| 제품 중량 | kg | 305 | 260 | 240 | 260 |
| ※1 | 본 유닛 단독으로의 정밀도를 나타냅니다. 타이밍 벨트를 사용할 때 발생하는 잔류 진동은 포함되지 않습니다. |
| ※2 | 속비, 부하에 따라 능력이 변화합니다. |
| ※3 | 부하 체중량을 나타냅니다. |
| ※4 | 출력축 중심 높이에 대한 부하 하중을 나타냅니다. |
| ※5 | 타이밍 벨트는 잔류 진동을 억제할 수 있는 탄성 변형이 적은 형식을 사용해 주십시오. |
| ※6 | 냉각용 에어에 사용합니다. |
| ※7 | 냉각 에어 공급량에 따라 능력은 변화합니다. 모터 온도 60도 이상으로 냉각용 에어가 공급됩니다. |
Push/Pull 라인

- 이전글루프 컨트롤러 VSC/VLC 시리즈 24.03.25
- 다음글가전용 모터 코어 전적 금형 구동 장치 Servo-dex EVR2 시리즈 24.03.25