Sankyo Seisakusho CAMBALANCER
페이지 정보

본문

캠식 반송 위치 결정 장치

샌덱스는 서보 모터 등을 구동원으로 한 액추에이터나 기어 구동과 비교하여 고속성 및 위치결정 정밀도 면에서 발군의 어드밴티지가 있습니다. 롤러 전달 방식의 롤러 기어 캠 기구는 백래시가 없고(정류시) 캠 곡선에 의한 인덱싱 구간과 정류 구간의 조합에 의해 고속, 고정밀도의 위치결정을 실시합니다.
산쿄제작소는 일본에서 처음으로 이 기구를 이용한 상품화에 성공하여 이후 독자적인 캠 기술이 현재도 최첨단 생산설비에 적응, 고도의 생산성을 가지는 자동기계의 중심을 담당하는 주요 컴포넌트로 활용됨 있습니다. 세계 최소의 초소형 타입부터 초대형 타입까지, 모든 사이즈나 움직임에 대응할 수 있도록 풍부한 라인업을 갖추고 있습니다.
산쿄제작소는 일본에서 처음으로 이 기구를 이용한 상품화에 성공하여 이후 독자적인 캠 기술이 현재도 최첨단 생산설비에 적응, 고도의 생산성을 가지는 자동기계의 중심을 담당하는 주요 컴포넌트로 활용됨 있습니다. 세계 최소의 초소형 타입부터 초대형 타입까지, 모든 사이즈나 움직임에 대응할 수 있도록 풍부한 라인업을 갖추고 있습니다.



캠 밸런서는, 샌덱스의 입력축(캠축)에 장착해, 모터로부터 입력축까지의 입력 특성, 위치 결정 정밀도 등의 출력 특성을 개선해, 인덱싱 동작을 이상 상태에 근접시키는 장치입니다.
이것들은, 캠식 인덱스의 인덱싱 동작시에 발생하는 입력 변동 토크를 상쇄함으로써 실현할 수 있습니다. 캠 밸런서는, 캠식 인덱스의 입력축에 작용하는 변동 토크에 대하여 작용 방향이 반대가 되는 보상 토크를 만들어, 작용시킴으로써, 종래 문제가 되고 있는 입력 구동계의 흔들림이나 회전 불균일을 일으키는 원인과 가능한 변동 토크를 완전히 상쇄하는 것을 목표로 합니다. 캠 밸런서 장착의 장점은 다음과 같습니다.
이것들은, 캠식 인덱스의 인덱싱 동작시에 발생하는 입력 변동 토크를 상쇄함으로써 실현할 수 있습니다. 캠 밸런서는, 캠식 인덱스의 입력축에 작용하는 변동 토크에 대하여 작용 방향이 반대가 되는 보상 토크를 만들어, 작용시킴으로써, 종래 문제가 되고 있는 입력 구동계의 흔들림이나 회전 불균일을 일으키는 원인과 가능한 변동 토크를 완전히 상쇄하는 것을 목표로 합니다. 캠 밸런서 장착의 장점은 다음과 같습니다.
| B08 | B10 | B12 | B16 |
・ 입력축 토크를 평준화하고, 피크 토크가 작아진다
・ 피크 전류를 억제하고, 구동용 모터의 소형화를 도모할 수 있다
・ 입력계의 백래시나, 휨의 영향을 줄인다.
・ 입력축의 회전 불균일이 감소한다
・ 구동용 모터의 제어성이 개선된다
・ 에너지 절약 효과가 높다
・ 출력 특성이 개선되고, 이상 상태에 가까워진다
・ 잔류 진동이 감소하고, 위치 조정 시간이 단축된다・진동
, 소음이 감소한다
・ 위치 결정 정밀도가 좋아진다
・ 수명 시간이 늘어나 신뢰성이 높아진다
・ 고속화를 도모할 수 있다
・ 피크 전류를 억제하고, 구동용 모터의 소형화를 도모할 수 있다
・ 입력계의 백래시나, 휨의 영향을 줄인다.
・ 입력축의 회전 불균일이 감소한다
・ 구동용 모터의 제어성이 개선된다
・ 에너지 절약 효과가 높다
・ 출력 특성이 개선되고, 이상 상태에 가까워진다
・ 잔류 진동이 감소하고, 위치 조정 시간이 단축된다・진동
, 소음이 감소한다
・ 위치 결정 정밀도가 좋아진다
・ 수명 시간이 늘어나 신뢰성이 높아진다
・ 고속화를 도모할 수 있다
캠 밸런서는 스프링식 토크 보상 장치입니다.
이번에 개발된 캠 밸런서는 변형식 에너지 방식
에 의한 토크 보상 장치이므로, 여기서 스프링을 이용한
토크 보상 장치의 토크 상쇄에 대해 설명합니다.
입력축에 작용하는 관성 토크 Ti는
이번에 개발된 캠 밸런서는 변형식 에너지 방식
에 의한 토크 보상 장치이므로, 여기서 스프링을 이용한
토크 보상 장치의 토크 상쇄에 대해 설명합니다.
입력축에 작용하는 관성 토크 Ti는
I : 출력축 관성 모멘트
τh : 인덱싱 각도
th : 위치 결정 시간
θh : 할당 각
A : 무차원 가속도
V : 무차원 속도가
됩니다.
τh : 인덱싱 각도
th : 위치 결정 시간
θh : 할당 각
A : 무차원 가속도
V : 무차원 속도가
됩니다.
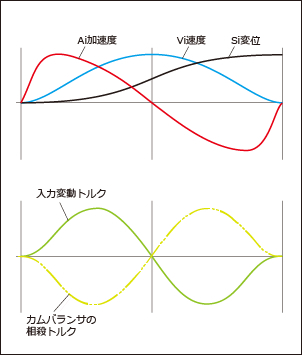
Ti는 A·V에 비례하므로 입력축에는 전반부에서 양수, 후반부에 음의 토크가 발생합니다. 그래서 이 토크를 상쇄하기 위해서는 전반부에서 음수, 후반부에 양의 토크를 스프링으로 발생시켜야 합니다. 전반부에서는, 미리 압축 상태에 있는 스프링으로부터, 에너지를 꺼내, 입력축에 주고, 후반에서는, 입력축의 에너지로부터 스프링을 압축함으로써 원래의 압축 상태로 되돌림으로써 목적으로 하는 변동 토크를 발생시킨다 수 있습니다.
MS 곡선의 변동 토크
또, 2단계의 상쇄 토크값의 설정이 가능하고, 에어 공급의 ON·OFF에 의해, 스프링의 초기 압축량을 신축시키는 것으로, 발생하는 보상 토크를 2단계로 조정할 수 있다고 하는 것입니다.
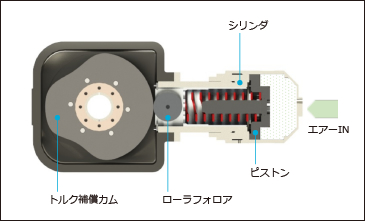
아래 그림과 같이 에어 해방 상태에서 '약', 에어 MAX에 충전함으로써 '강'이라는 2 단계 토크 설정이 가능합니다.
이 강·약의 출력 토크값은 기종 선정 시에 미리 설정할 수 있으므로 사용 조건에 맞춘 이용이 가능합니다.
아래 그림과 같이 에어 해방 상태에서 '약', 에어 MAX에 충전함으로써 '강'이라는 2 단계 토크 설정이 가능합니다.
이 강·약의 출력 토크값은 기종 선정 시에 미리 설정할 수 있으므로 사용 조건에 맞춘 이용이 가능합니다.
"강한"상태
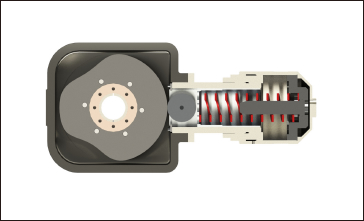
"약" 상태


D 시리즈

DF 시리즈

대형 인덱스
- 이전글오실레이팅 드라이브 E 시리즈 24.03.25
- 다음글FHC 시리즈 24.03.25