KONSEI 박형 평행 핸드(크로스 롤러 타입) HLB
페이지 정보

본문

핸드 & 척 로봇 주변 기기 목록
평행 핸드

박형 평행 핸드(크로스 롤러 타입)
HLB
부드러운 작동으로 고정밀 얇은 평행 핸드
■ 크로스 롤러 타입.
크로스 롤러 타입의 베어링 가이드로 부드럽고 고정밀 작동을 실현.
■컴팩트하고 롱 스트로크.
전체 높이가 낮고 컴팩트한 디자인.
스트로크가 길기 때문에 크고 작은 워크에 겸용 대응할 수 있습니다.
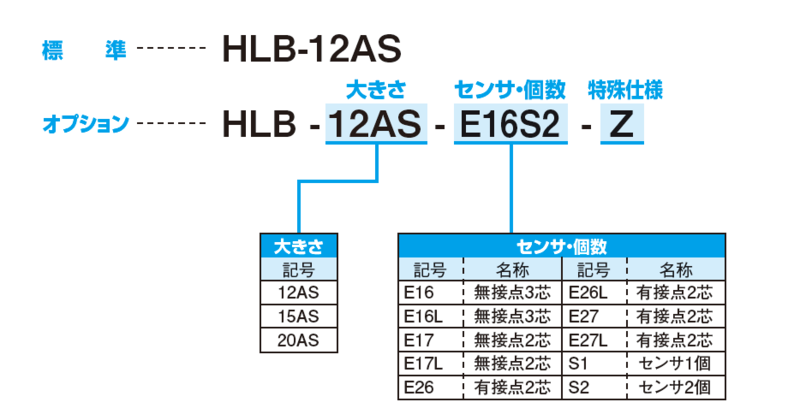
형식표시방법
사양
| 형식 | HLB-12AS | HLB-15AS | HLB-20AS |
|---|---|---|---|
| 구동원 | 에어 0.1~0.7MPa | ||
| 윤활 | 무급유 또는 터빈유 1종(ISOVG32) | ||
| 주위 온도 (℃) | 5~60 | ||
| 동작 스트로크(mm) | 13 | 18 | 23 |
| 실린더 직경(mm) | φ12 | φ15 | φ20 |
| 내부 용적[왕복](cm³/회) | 1.47 | 3.18 | 7.22 |
| 반복 정밀도 (mm) | ±0.01 | ||
| 본체 질량 (kg) | 0.214 | 0.402 | 0.678 |
다운로드
카탈로그(사양서?치수도)
카탈로그 다운로드| 형식 규격 | 옵션 | DXF 데이터 | STEP, IGES 데이터 |
|---|---|---|---|
| HLB-12AS |  | ||
| HLB-15AS | | | |
| HLB-20AS | | |
옵션 사양 세부 사항
- 이전글고무 커버 부착 박형 평행 핸드(부시 타입) HLAG 24.02.14
- 다음글고무 커버 부착 박형 평행 핸드(크로스 롤러 타입) HLBG 24.02.14