KONSEI 퀵 프로텍터 QRB
페이지 정보

본문

핸드 & 척 로봇 주변 기기 목록
빠른 조정

퀵 프로텍터
QRB
과부하 방지 기능이 있는 자동 조심 장치.
■수지 바디의 채용에 의해 경량, 컴팩트.
■총하중과 핸들링 위치에서의 횡하중에 의한 과부하 검출이 가능.
■ 심플 구조에 의한 저가격을 실현.
■ 2 방향 손톱, 3 방향 손톱의 선택이 가능.
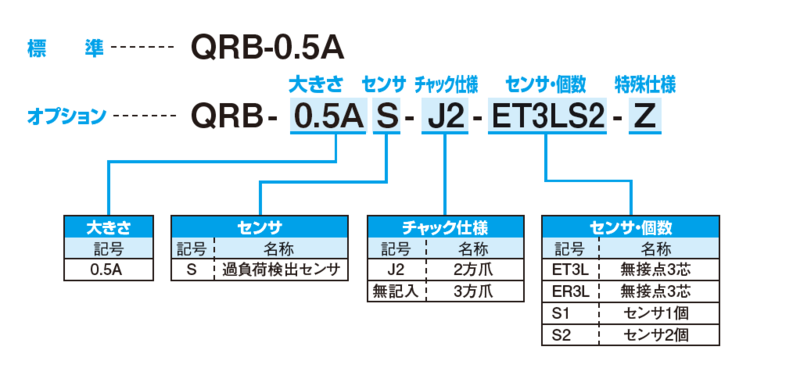
형식표시방법
사양
| 형식 | QRB-0.5A | QRB-0.5A-J2 | |
|---|---|---|---|
| 대응 척 형식 | CKL-20AS | CKL-20AS-J2 | |
| 주위 온도 (℃) | 5~60 | ||
| 이동량 | XY 방향 | ±1mm | |
| 나사 방향 (α) | ±3° | ||
| 컴플라이언스 각도(β) | ±5° | ||
| 버퍼 스트로크(Z) | 4mm | ||
| 반복 정밀도 | XY 방면 | ±0.15 | |
| α, θ 각 | ±0.3° | ||
| 과부하 검출 반응 범위 | θ | 오른쪽 그림 참조 | |
| Z | 오른쪽 그림 참조 | ||
| 과부하 검출 센서 형식 | E2EC-CR8D1( 오므론제) | ||
| 휴대용 무게 | 0.4kg( 센터링 복귀 허용 부하) | ||
| 버퍼 하중 | 스트로크 0시 | 2kgf | |
| 스트로크 최대시 | 2.8kgf | ||
| 설치자세 | 척 하향·몸체 수평 방향 | ||
| 본체 무게 | 0.11kg+0.12kg(척 중량) | ||
주1: 척 및 척 개폐 확인 센서의 사양은 종합 카탈로그를 참조해 주십시오.
주2:척에의 에어 배관은 센터링력의 방해가 되지 않는 듯 부드러운 재질(폴리우레탄 등)을 사용해 주십시오.
다운로드
카탈로그(사양서?치수도)
카탈로그 다운로드| 형식 규격 | 옵션 | DXF 데이터 | STEP, IGES 데이터 |
|---|---|---|---|
| QRB-0.5A |  | | |
| QRB-0.5A-J2 | | |
옵션 사양 세부 사항
- 이전글임의 위치 Lock Quick Adjuster QRD 24.02.13
- 다음글매엽형 웨이퍼 핸드 WHA?WHF 시리즈 24.02.13