KONSEI 핸드&척 로봇 주변기기 > 유닛 상품
페이지 정보

본문

핸드 & 척 로봇 주변 기기 목록
유닛 상품

고속 선회 W척 유닛
EXM
서보 모터 구동에 의한 스위블식 선회 유닛.
■ 선회 시간 0.6초.
고속 선회시에 발생하는 충격·진동을 서보 모터로 제어.
사이클 타임의 대폭 단축을 실현합니다.
■내환경성.
모터를 암 상부에 설치하기 때문에 절삭유 등의 영향을 받지 않습니다.
■ 스키마 조정기구 부착.
회전축의 가타 조정이 가능하고 고내구성. 유지 보수가 간단합니다.
■ 라인 구성 자유 자재. (모터, 타이밍 벨트는 고객 주문)
타이밍 벨트용 풀리를 표준 장비.
고객의 사양에 맞는 라인 구성을 구축할 수 있습니다.
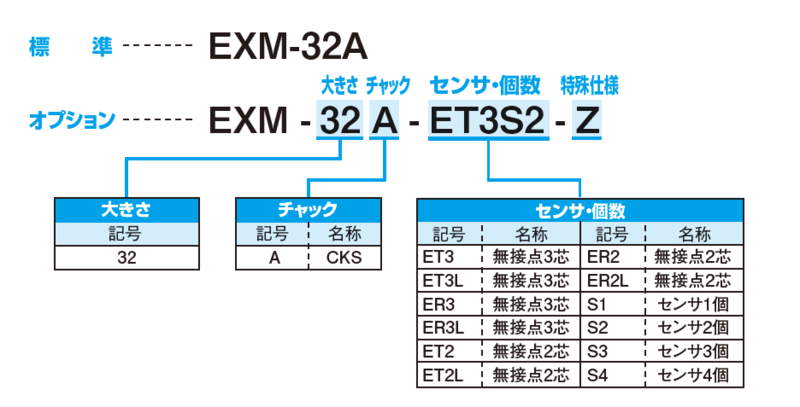
형식표시방법
사양
| 형식 | EXM-32A | |
|---|---|---|
| 구동원 | 소용돌이 | 서보 모터(고객에서 선정·수배) |
| 손 | 에어 0.2~0.7MPa | |
| 윤활 | 소용돌이 | 극압 첨가제 함유 윤활유(VG150) |
| 손 | 무급유 또는 터빈유 1종(VG32) | |
| 주위 온도(℃) | 5~60 | |
| 소용돌이 시간 | 0.6sec 이상/180° | |
| 대상 워크 질량(kg) | 5 | |
| 대상 척 형식 | CKS-32AS | |
| 동작 스트로크(mm) | 32 | |
| 파지력(P=0.5Mpa) | 900N | |
| 반복 정밀도 | 소용돌이 | ±0.05(척 끝면) |
| 손 | ±0.01 | |
| 본체 질량(kg) | 8.3 | |
■서보 모터 선정 기준
| 선회축 감속비 | 40:1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 허용운동에너지(J) | 2.5 | |||||||||
| 풀리 회전수(rpm) | 300 | 600 | 900 | 1200 | 1500 | 1800 | 2100 | 2400 | 2700 | 3000 |
| 허용 선회 토크(N?m) | 51.4 | 43.6 | 38.5 | 34.9 | 31.6 | 30.7 | 28.4 | 26.8 | 25.6 | 25 |
| 선회 토크 전달율(%) | 46 | 52 | 55 | 59 | 60.2 | 61.1 | 61.9 | 62.3 | 63.2 | 64.7 |
●사용예
워크 질량 4kg, 척 클로 길이 50mm, 선회 시간 0.6초의 경우 400W 서보 모터를 사용.
(모터 형식 MSM042P1A panasonic제)
※대상 워크 질량은 손톱의 길이에 따라 바뀝니다.
대상 척 형식의 파지력으로부터 검토해 주십시오.
다운로드
카탈로그(사양서?치수도)
카탈로그 다운로드| 형식 규격 | 옵션 | DXF 데이터 | STEP, IGES 데이터 |
|---|---|---|---|
| EXM-32A |  | |
옵션 사양 세부 사항
첨부파일
-
EXM.pdf (2.0M)
2회 다운로드 | DATE : 2024-02-13 12:06:36 -
オプション仕? 2.pdf (249.2K)
10회 다운로드 | DATE : 2024-02-13 12:06:36
- 이전글핸드&척 로봇 주변기기 > 유닛 상품 24.02.13
- 다음글핸드&척 로봇 주변기기 > 유닛 상품 24.02.13