KITAGAWA 공작 기기 > 로봇 핸드 > QGB(L) 시리즈 > NTS-QM 시리즈
페이지 정보

본문

Robot hand
로봇 핸드
산업용 로봇 전용 그리퍼
KITAGAWA는 척으로 길러진 「물건을 파악하는」기술을 살려, 「
산업용 로봇 전용 그리퍼」라고 하는 신분야에서도, 제조에 공헌합니다.
Robot hand
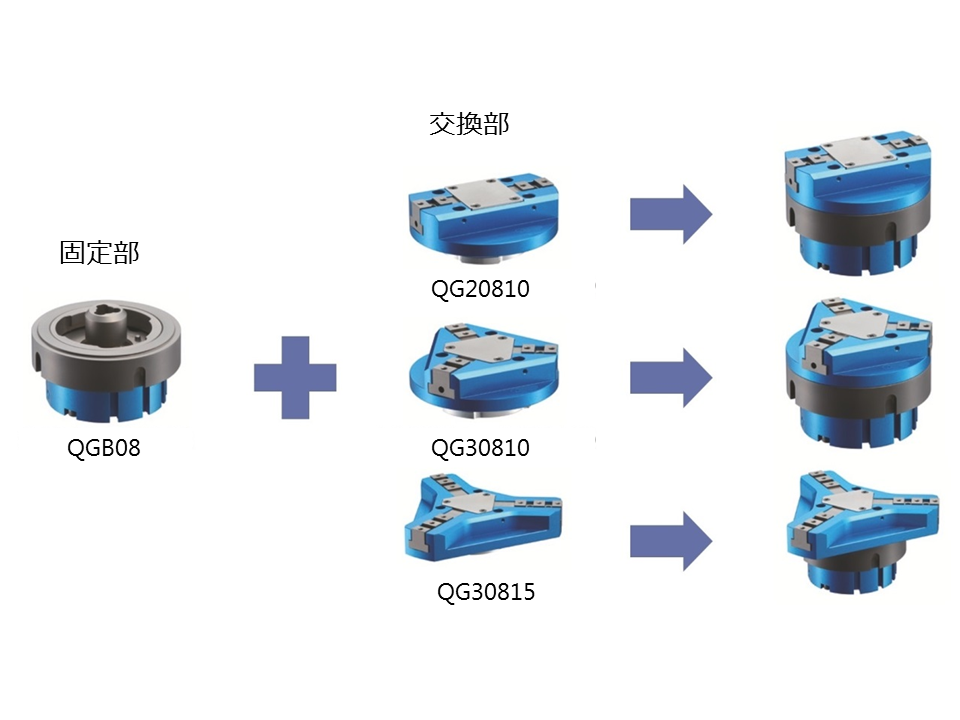
절제 그리퍼 QGB (L) 시리즈
퀵 플레이트 변경 그리퍼
QGB(L) 시리즈
|
|
주문 형식
공압이 저하했을 때에도 워크를 탈락하지 않도록 공압 회로에 체크 밸브를 사용해 주십시오.
리드 스위치로 조스 트로크를 검출하는 경우는 상품의 외주에 설치 홈을 준비하고 있으므로 그 홈을 이용하여 리드 스위치를 설치하십시오.
리드 스위치는 최대 6개까지 설치 가능합니다. 또한, 본 모델에서는 근접 스위치에 의한 스트로크 확인은 할 수 없습니다.그리퍼에 사용하고 있는 내부 씰의 재질은 니트릴 고무(NBR)입니다. 불소 씰을 희망하시는 경우는 당사에 상담해 주십시오.
사양표
고정부 QGB 사양
| 형식 | 피스톤 스트로크 (mm) | 피스톤 추력 (주1) | 본체 질량 (kg) | 유체 소비량 (cm 3 /왕복) | 사용 공압 (MPa) | 주위 온도 (℃) | 록너트 체결토크 (N?m) | |
|---|---|---|---|---|---|---|---|---|
| 당김 측 (N) | 누름측 (N) | |||||||
| QGB06 | 7.5 | 867 | 968 | 0.75 | 24.1 | 0.2 ~ 0.8 | 5~60 | 12 |
| QGBL06 | 15 | 0.85 | 52.6 | |||||
| QGB08 | 10 | 1353년 | 1506년 | 1.15 | 50.2 | 20 | ||
(주1) 공급공압력 0.6MPa에서의 값입니다.
(주 2) QGBL06은 롱 스트로크 타입입니다.
교환부 QG 사양
| 형식 | 적합 베이스 형식 | 조스트로크 직경 ( mm) | 파지력 (주1) | 반복 정밀도 (참고값) (mm) | 본체 질량 (kg) | 사용공압 (MPa) | 주위 온도 (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| 측정 거리 (mm) | 외경 파악 (N) | 내경 파악 (N) | |||||||
| QG30608 | QGB06 | 11.2 | 20 | 750 | 800 | ±0.03 | 0.33 | 0.2 ~ 0.8 | 5~60 |
| QG20608 | 0.30 | 0.2 ~ 0.6 | |||||||
| QGL30610 | QGBL06 | 24.0 | 0.64 | 0.2 ~ 0.8 | |||||
| QG30810 | QGB08 | 15.6 | 20 | 1010 | 1120 | 0.55 | 0.2 ~ 0.8 | ||
| QG30815 | 0.90 | ||||||||
| QG20810 | 0.40 | 0.2 ~ 0.6 | |||||||
(주1) 공급공압력 0.6MPa에서의 값입니다.
(주 2) QGL30610은 롱 스트로크 타입입니다.
취급 설명서
* QG (표준 스트로크 타입)의 사용 설명서는 여기 에서 다운로드
* QGL (롱 스트로크 타입)의 사용 설명서는 여기 에서 다운로드
면반을 탈착할 때는 아래의 설명서에 따라 작업하십시오.
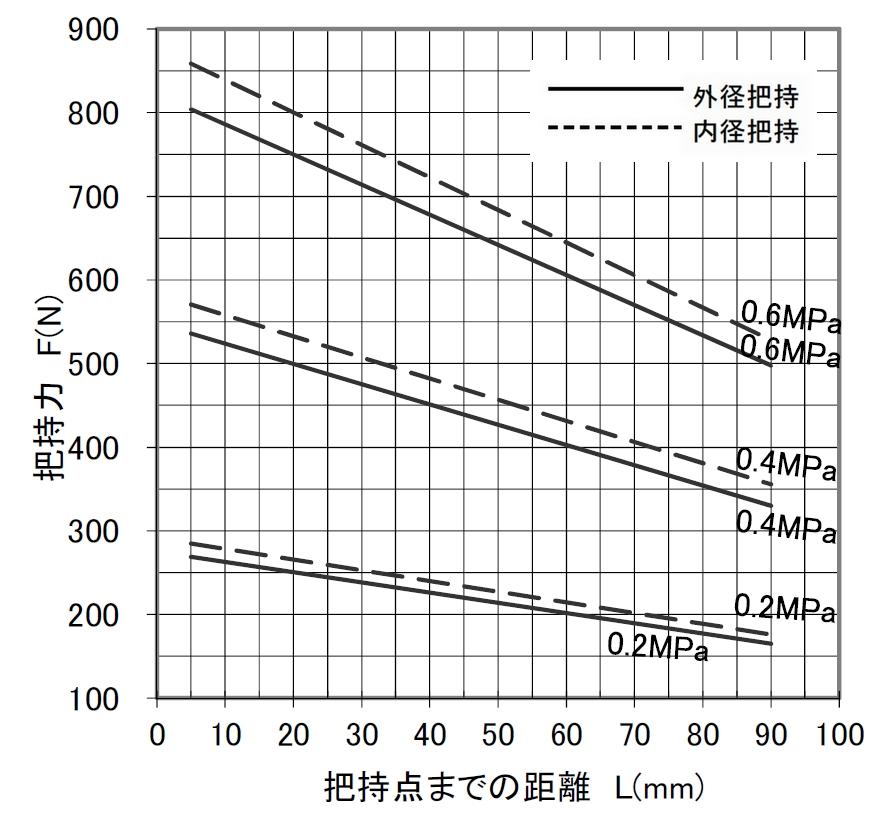
파지력
형식을 선택하면 파지력선도를 표시합니다. 그래프의 파지력 F 는, 손톱당의 실측 파지력 F1× 손톱 개수를 나타내고 있습니다.
- QG20608
- QG30608
- QGL30610
- QG20810
- QG30810
- QG30815
그리퍼의 형식, 사용공압력 등의 파지조건으로부터 파지력을 계산합니다.
파지력 계산로봇 핸드 전용 시뮬레이터

Robot hand
절제 그리퍼 NTS-QM 시리즈
퀵 조 체인지 그리퍼
NTS-QM 시리즈
|
|
주문 형식

별도 NTS309 또는 NTS311 본체가 필요합니다.
사양표
| 형식 | 지름에서 조스 트로크 (mm) | 파지력 F (주1) | 반복 정밀도 (참고값) (mm) | 본체 질량 (kg) | 유체 소비량 (cm 3 /왕복) | 사용공압 (MPa) | 허용 조 질량(g) 1개 | 주위 온도 (℃) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 측정 거리 L(mm) | 외경 파지 (N) | 내경 파지 (N) | 로봇 가속도 | |||||||||
| 3m/s 2 | 6m/s 2 | 10m/s 2 | ||||||||||
| NTS-QM309 | 16 | 20 | 1010 | 1120 | ±0.02 | 0.70 | 50.2 | 0.2~0.8 | 240 | 210 | 150 | 5~60 |
| NTS-QM311 | 20 | 20 | 1810 | 1930 | ±0.02 | 1.29 | 112 | 0.2~0.8 | 240 | 210 | 150 | 5~60 |
(주1) 공급공압력 0.6MPa에서의 값입니다.
(주 2) 상기 사양은 각각 NTS309, NTS311에 내장한 상태에서의 것입니다.
도면 다운로드
- 이전글공작 기기 > 로봇 핸드 > NTS3 시리즈 > NPG3 시리즈> NTB3 시리즈 23.04.10
- 다음글공작 기기 > 로봇 핸드 > 스위치 적합표 > 씰 키트 23.04.10