KITAGAWA 공작 기기 > 로봇 핸드 > NTS2 시리즈 > NPGT 시리즈 > NPGT_S 시리즈
페이지 정보

본문

Robot hand
로봇 핸드
산업용 로봇 전용 그리퍼
KITAGAWA는 척으로 길러진 「물건을 파악하는」기술을 살려, 「
산업용 로봇 전용 그리퍼」라고 하는 신분야에서도, 제조에 공헌합니다.
Robot hand
2 손톱 평행 그리퍼 NTS2 시리즈
고품질 고내구성 표준 모델
NTS2 시리즈
|
|
주문 형식
공압이 저하했을 때에도 워크를 탈락하지 않도록 공압 회로에 체크 밸브를 사용해 주십시오.
리드 스위치 브래킷은 표준으로 제공됩니다.
근접 스위치로 조스 트로크를 직접 검출하는 경우는 별도 근접 스위치 브래킷을 요구해 주십시오.
그리퍼에 사용하고 있는 내부 씰의 재질은 니트릴 고무(NBR)입니다. 불소 씰을 희망하시는 경우는 당사에 상담해 주십시오.
사양표
| 형식 | 지름에서 조스 트로크 (mm) | 파지력 F (주1) | 반복 정밀도 (mm) | 본체 질량 (kg) | 유체 소비량 (cm 3 /왕복) | 사용공압 (MPa) | 주위 온도 (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| 측정 거리 L(mm) | 외경 파지 (N) | 내경 파지 (N) | |||||||
| NTS206 | 12 | 10 | 250 | 280 | ±0.01 | 0.29 | 8.4 | 0.2~0.8 | 5~60 |
| NTS208 | 16 | 10 | 460 | 490 | ±0.01 | 0.48 | 18.8 | 0.2~0.8 | 5~60 |
| NTS210 | 20 | 20 | 610 | 680 | ±0.01 | 0.78 | 35.1 | 0.2~0.8 | 5~60 |
| NTS212 | 24 | 20 | 850 | 970 | ±0.01 | 1.34 | 52.4 | 0.2~0.8 | 5~60 |
| NTS216 | 32 | 20 | 1520 | 1690 | ±0.01 | 2.52 | 123.2 | 0.2~0.8 | 5~60 |
| NTS220 | 40 | 20 | 2700 | 2870 | ±0.01 | 5.14 | 272.2 | 0.2~0.8 | 5~60 |
(주1) 공급공압력 0.6MPa에서의 값입니다.
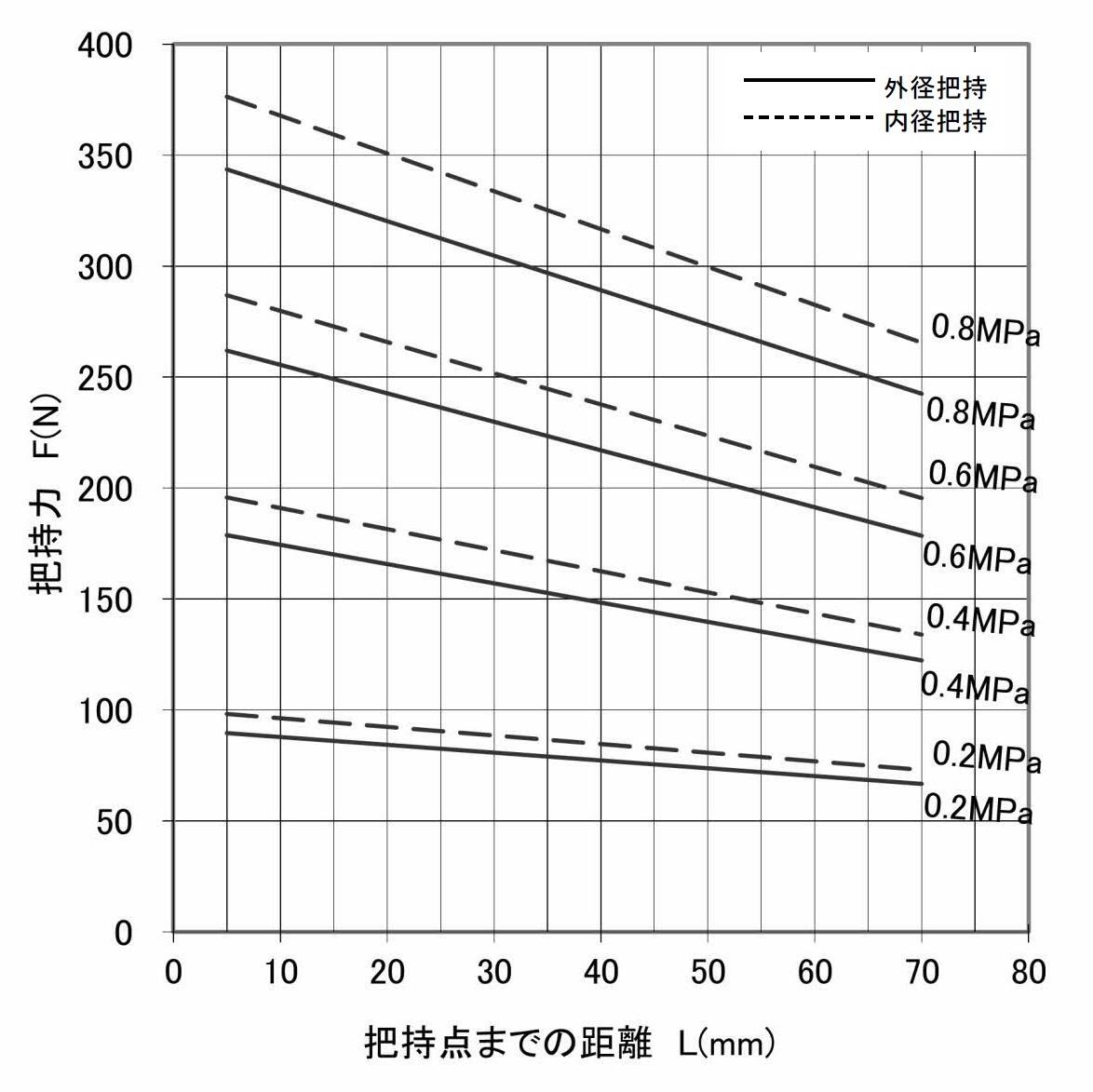
파지력
형식을 선택하면 파지력선도를 표시합니다. 그래프의 파지력 F 는, 손톱당의 실측 파지력 F1× 손톱 개수를 나타내고 있습니다.
- NTS206
- NTS208
- NTS210
- NTS212
- NTS216
- NTS220
그리퍼의 형식, 사용공압력 등의 파지조건으로부터 파지력을 계산합니다.
파지력 계산도면 다운로드
Robot hand
2 손톱 평행 그리퍼 NPGT 시리즈
얇은 2 손톱 평행 그리퍼
NPGT 시리즈
|
|
주문 형식
공압이 저하했을 때에도 워크를 탈락하지 않도록 공압 회로에 체크 밸브를 사용해 주십시오.
리드 스위치로 조스 트로크를 검출하는 경우는 상품의 외주에 설치 홈을 준비하고 있으므로 그 홈을 이용하여 리드 스위치를 설치하십시오.
근접 스위치로 조스 트로크를 직접 검출하는 경우는 별도 근접 스위치 브래킷을 요구해 주십시오.
그리퍼에 사용하고 있는 내부 씰의 재질은 니트릴 고무(NBR)입니다. 불소 씰을 희망하시는 경우는 당사에 상담해 주십시오
사양표
| 형식 | 지름에서 조스 트 로크 (mm) | 파지력 F (주1) | 반복 정밀도 (mm) | 본체 질량 (kg) | 유체 소비량 (cm 3 /왕복) | 사용 공압 (MPa) | 주위 온도 (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| 측정 거리 L(mm) (N) | 외경 파지 (N) | 내경 파지 (N) | |||||||
| NPGT08 | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10 | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12 | 26.4 | 10 | 2000년 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
| NPGT16 | 32.6 | 10 | 2800 | 2650 | ±0.008 | 4.60 | 524 | 0.2~0.8 | 5~60 |
(주1) 공급공압력 0.6MPa에서의 값입니다.
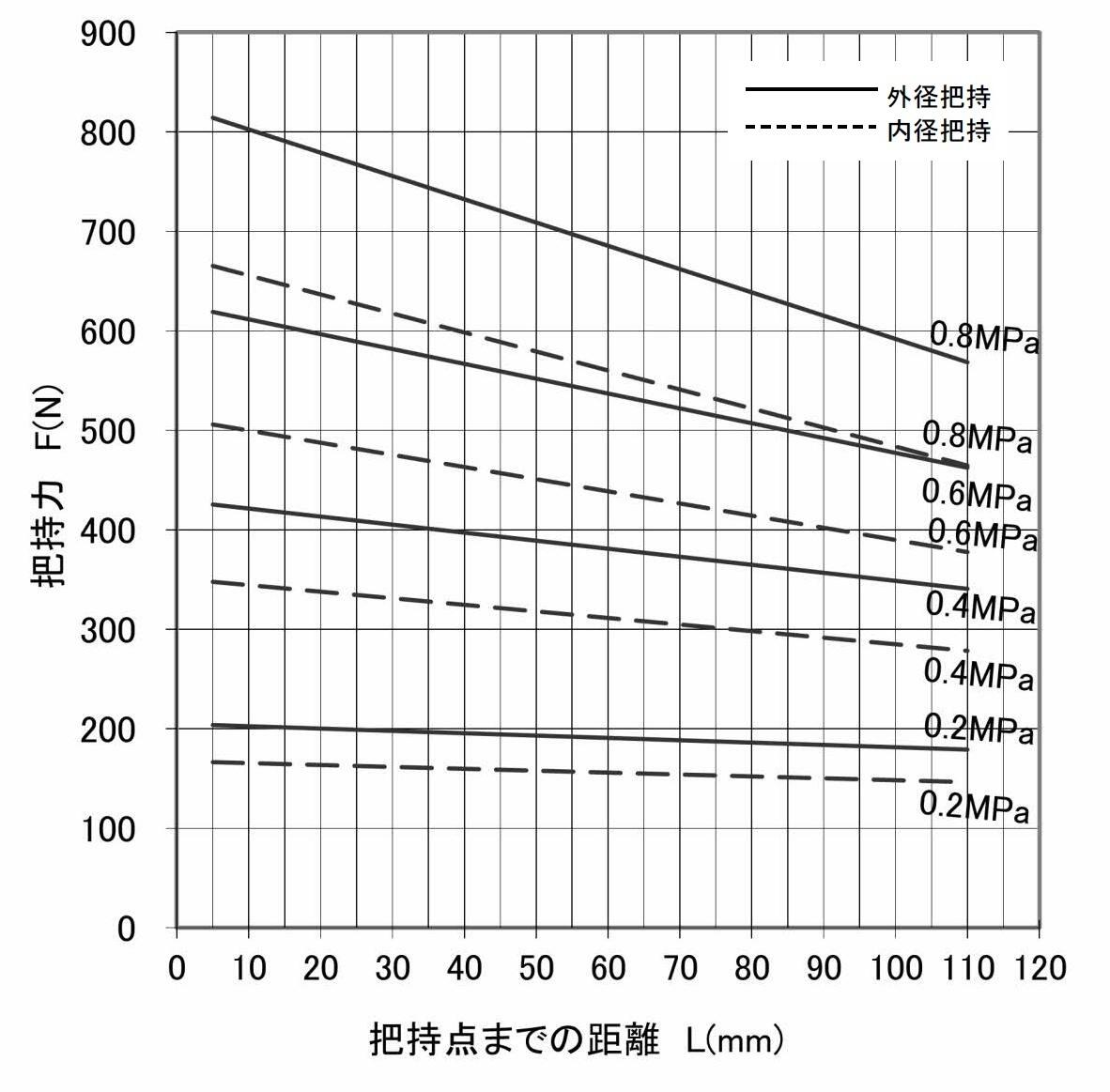
파지력
형식을 선택하면 파지력선도를 표시합니다. 그래프의 파지력 F 는, 손톱당의 실측 파지력 F1× 손톱 개수를 나타내고 있습니다.
- NPGT08
- NPGT10
- NPGT12
- NPGT16
그리퍼의 형식, 사용공압력 등의 파지조건으로부터 파지력을 계산합니다.
파지력 계산Robot hand
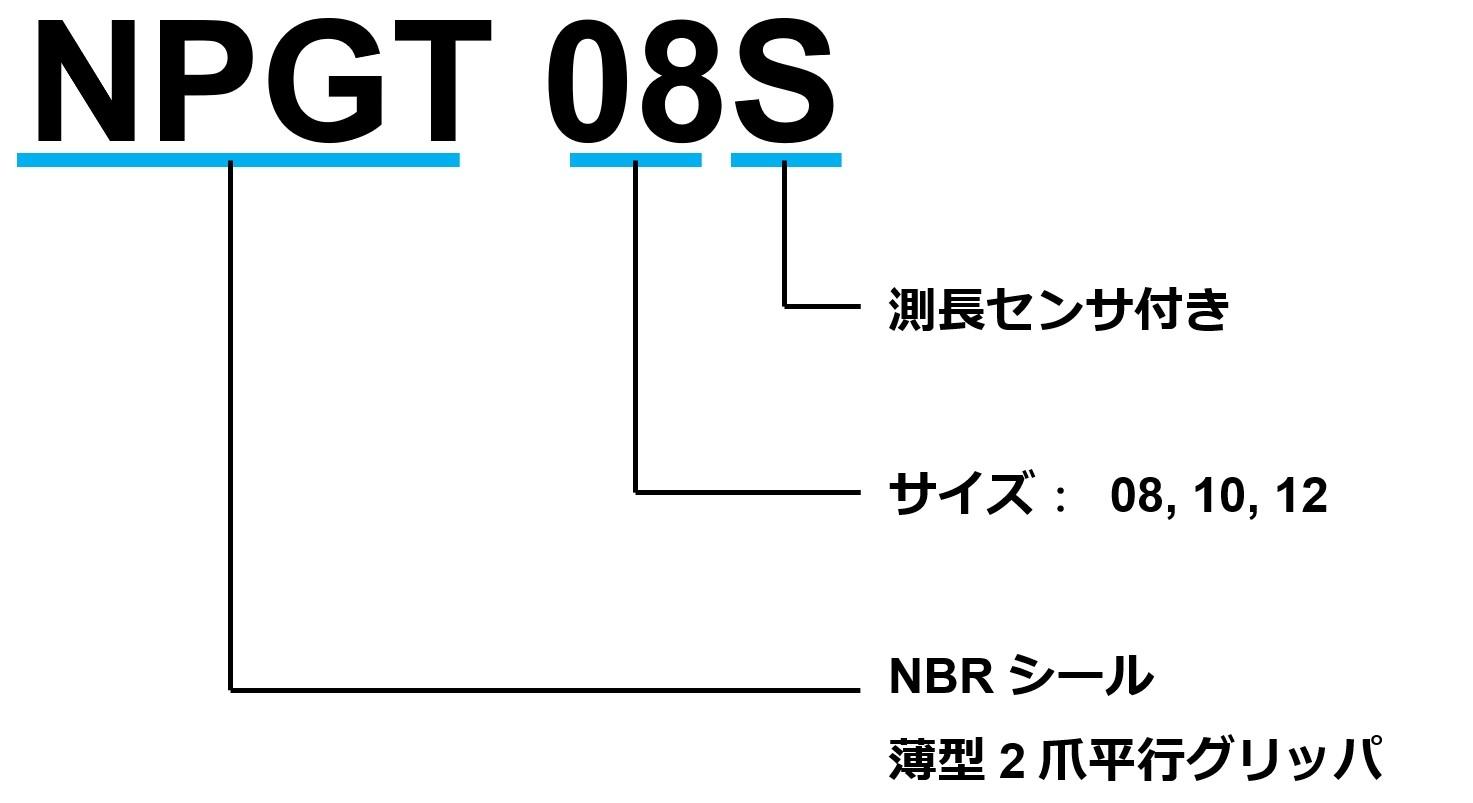
2 손톱 평행 그리퍼 NPGT_S 시리즈
박형 2발 평행 그리퍼 스케일
사양
2020년 초모노 만들기 부품 대상 “기계·로봇 부품상” 수상

NPGT_S 시리즈
|
|
주문 형식
공압이 저하했을 때에도 워크를 탈락하지 않도록 공압 회로에 체크 밸브를 사용해 주십시오.
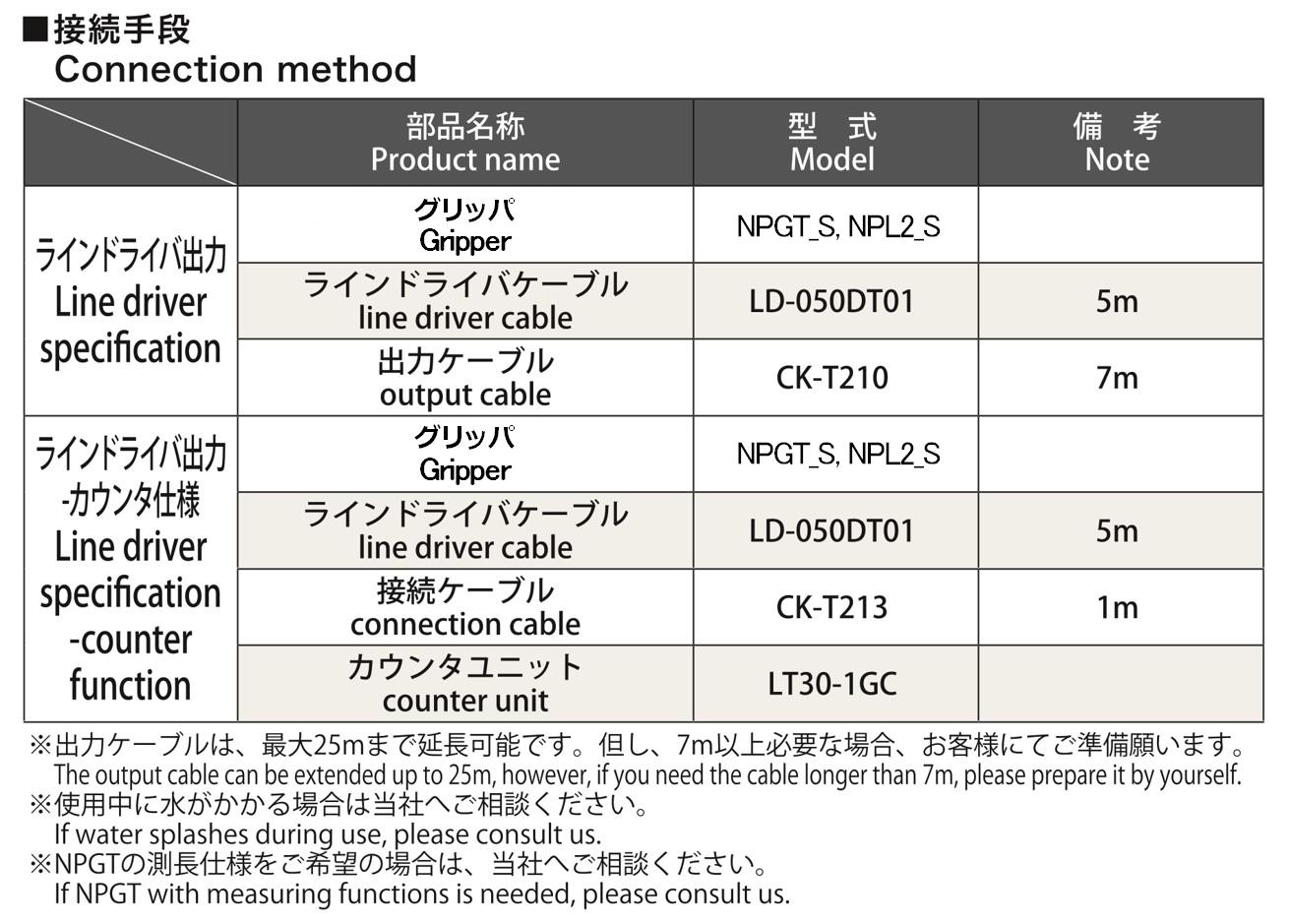
신호의 출력 형태에 따라 케이블 등의 옵션 부품이 다르므로, 그리퍼를 발주시에 당사의 영업 담당에 용명해 주십시오. 폐사의 영업 거점은 이쪽으로부터 확인해 주세요 .
리드 스위치로 조스 트로크를 검출하는 경우는 상품의 외주에 설치 홈을 준비하고 있으므로 그 홈을 이용하여 리드 스위치를 설치하십시오.
근접 스위치로 조스 트로크를 직접 검출하는 경우는 별도 근접 스위치 브래킷을 요구해 주십시오.
그리퍼에 사용하고 있는 내부 씰의 재질은 니트릴 고무(NBR)입니다. 불소 씰을 희망하시는 경우는 당사에 상담해 주십시오
사양표
| 형식 | 지름에서 조스 트 로크 (mm) | 파지력 F (주1) | 반복 정밀도 (mm) | 본체 질량 (kg) | 유체 소비량 (cm 3 /왕복) | 사용 공압 (MPa) | 주위 온도 (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| 측정 거리 L(mm) (N) | 외경 파지 (N) | 내경 파지 (N) | |||||||
| NPGT08S | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10S | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12S | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
(주1) 공급공압력 0.6MPa에서의 값입니다.
(주2) 위 표의 사양은 스케일 없음 사양(NPGT)과 동일합니다.
{kind=link}
파지력
형식을 선택하면 파지력선도를 표시합니다. 그래프의 파지력 F 는, 손톱당의 실측 파지력 F1× 손톱 개수를 나타내고 있습니다.
- NPGT08S
- NPGT10S
- NPGT12S
그리퍼의 형식, 사용공압력 등의 파지조건으로부터 파지력을 계산합니다.
파지력 계산- 이전글공작 기기 > 척 부품 (2) 23.04.10
- 다음글공작 기기 > 로봇 핸드 > NTS3 시리즈 > NPG3 시리즈> NTB3 시리즈 23.04.10