KONSEI 핸드&척 로봇 주변기기 > 선회
페이지 정보

본문

핸드 & 척 로봇 주변 기기 목록
소용돌이

메카 로터
ZRB
랙식 초소형 회전 액추에이터.
■ 랙 식으로 에어 누출을 잘라.
■베인식에 대해, 40% 사이즈 다운으로, 철저하게 공간 절약.
■ 동일면에 "스토퍼" "배관" "센서"가 집합.
■ 설치가 2 방향에서 가능한 관통 구멍.
■본체 설치시의 심출이 용이한 위치결정용 핀 구멍 가공.
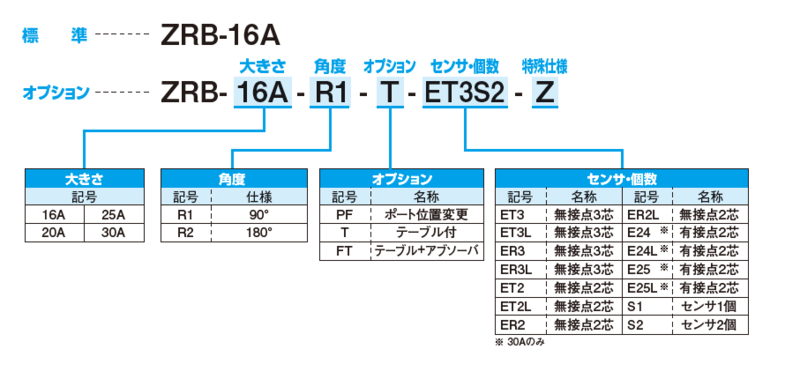
형식표시방법
사양
| 형식 | ZRB-16A | ZRB-20A | ZRB-25A | ZRB-30A | ||
|---|---|---|---|---|---|---|
| 구동원 | 에어 0.15~0.7MPa | |||||
| 윤활 | 무급유 또는 터빈유 1종(ISOVG32) | |||||
| 주위 온도 (℃) | 5~60 | |||||
| 소용돌이 시간 | 0.1~1.5 S/90° | |||||
| 소용돌이 각도 | 90°/180° | |||||
| 실린더 직경 (mm) | φ16×2 | φ20×2 | φ25×2 | φ30×2 | ||
| 반전 토크 (N·m-이론치) | 1.72×P | 3.40×P | 6.36×P | 11.12×P | ||
| 허용 하중 | 레이디얼 (N) | Fr | 29.2 | 59 | 84 | 127 |
| 스러스트 (N) | Fsa | 14.6 | 29.5 | 42 | 63.5 | |
| 스러스트 (N) | Fsb | 14.6 | 29.5 | 42 | 73 | |
| 모멘트 (N ・m) | M | 0.715 | 1.68 | 2.69 | 4.70 | |
| 허용 운동 에너지 (J) | 표준 | 0.0146 | 0.0307 | 0.0479 | 0.0751 | |
| 업소버 대응 | 0.68 | 0.68 | 0.68 | 0.68 | ||
| 본체 질량 (kg) | R1 | 0.232 | 0.356 | 0.572 | 0.840 | |
| R2 | 0.266 | 0.444 | 0.726 | 1.088 | ||
다운로드
카탈로그(사양서・치수도)
카탈로그 다운로드| 형식 규격 | 옵션 | DXF 데이터 | STEP, IGES 데이터 |
|---|---|---|---|
| ZRB-16A-R1 | PF:포트 위치 변경(정면측) FT:테이블+업소버 |  | |
| ZRB-16A-R2 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-20A-R1 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-20A-R2 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-25A-R1 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-25A-R2 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-30A-R1 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | | |
| ZRB-30A-R2 | PF:포트 위치 변경(정면측) FT:테이블+업소버 | |
옵션 사양 세부 사항
첨부파일
-
ZRB.pdf (2.6M)
0회 다운로드 | DATE : 2024-02-13 12:22:13 -
オプション仕様 2.pdf (249.2K)
0회 다운로드 | DATE : 2024-02-13 12:22:13
- 이전글핸드&척 로봇 주변기기 > 선회 24.02.13
- 다음글핸드&척 로봇 주변기기 > 슬라이드 24.02.13