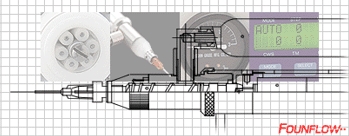
PILOT 고점도 유체 용 도포 로봇 FDH3000mp
페이지 정보

본문

| 디스펜서 | ||||||
 |  | |||||
| 흐름 시리즈는 반죽 고점도 유체에서 물 같은 저점도 액체까지 재료의 점도와 특성에 맞게 스크류 식, 기어 식 튜브식와 3 종류의 펌프 방식을 채용. 미량에서 연속 토출까지 모든 토출 패턴에 대응하는 고성능 디스펜서 군입니다. | ||||||
| 고점도 유체 용 도포 로봇 | ||||||
 | (50,000 cps ~ 반죽 용) 페이스트 등에 적합한 스크류 펌프 식 가압식 스크류 펌프 | |||||
| FDH3000mp 고점도 유체 용 자동 도포 장치로서 필요한 기능을 하나로했습니다 | |||||

| 고점도 유체 용 도포 로봇 FDH3000mp | ||||||||
| 그리스, 고점도 일 액형 에폭시 등의 미량 토출에 최적 인 고점도 체 (5 만 ~ 50 만 CPS) 용 분배 로봇 | ||||||||
| 가압식 스크류 펌프에 의한 탈포 작용 특수 나사와 공기 방출 구멍에 의해 재료의 기포가 원인으로 일어나는 하늘 침을 방지 할 수 있습니다. |  | |||||||
| 토출 가능 재료의 종류 | ||||||||
| 팬 흐름 HV3000mp은 그리스 말에서 공기에 의한 변화가없는 재료를 토출 할 수 있습니다. | ||||||||
| 베어링, 기어에 신청 | 실리콘, 그리스 계 | |||||||
| 마찰 소부 방지 윤활제 | 이황화 몰리브덴 | |||||||
| 충전, 포팅 | 그리스 모양 일 액형 에폭시 수지 | |||||||
| 단자 등의 코팅 | 접점 전도성 그리스 | |||||||
| 기어의 토크 조정 등 | 토크 그리스 | |||||||
| 접점 단자에 신청 | 실버 페이스트 | |||||||
| 기초 신청 | 크림 솔더 (땜납) | |||||||
| 연결 장치 | ||||||||
| 연결 장치에 의해 구입 후 바로 사용할 수 있습니다. 펌프 고정 브래킷 각 연결 케이블 구성 용 플로피 디스크가 표준 첨부되어 있습니다. ※ 테이블은 옵션입니다. | ||||||||
| PC 용 로봇 제어 소프트웨어 | ||||||||
| JR C-Points (도포 사양) 단순화 된 버전을 표준 첨부 ● 프로그램 번호 별 좌표 등록 · 수정 · 복사 등의 편집 및 Excel 등으로 만든 좌표 데이터 붙여넣고, 신속한 DXF 데이터 캡처 기능 등을 간단하게 할 수 있습니다. ● Job 프로그램, 신속한 시퀀서 기능은 시퀀스 프로그램 감각으로 간단하게 사용 할 수 있습니다. 따라서 토출 용도에 따라 프로그램이 가능합니다. | ||||||||
| 도포에 적합한 로봇 동작 조건 설정이 가능 | ||||||||
| 토출 조건 설정 팬 흐름 단체로 토출 조건 (토출량 / 토출 속도 / 실 인수 량 / 양념 방지 / Air)를 결정합니다. ●점 토출 설정은 회 전량 (CWS) 회전 속도 (SPEED), Air (공압)을 조정하면서 토출량 을 설정합니다. ● 선 토출 설정은 로봇 측의 도포 시간, 회전 속도 (SPEED), Air (공압)을 조정하면서 토출량을 설정합니다. ● 토출 조건의 기억 16 가지 조건 (Air 제외)이 기억할 수 있습니다. 로봇 측의 태그 코드 번호로 선택합 니다. | ||||||||
| 점 도포하려면 종별를 점 도포하고, 도포 포인트 위치 태그 코드 번호 (팬 흐름 신청 조건 번호)를 입력합니다. 선 신청하려면 선 토출 시작 / 끝 태그 코드 번호 (팬 흐름 INT 모드)를 입력합니다. 신청 시작 ... 선두 부 신청이 부족하지 않도록 이동 전에 대기 시간을 설정합니다. 도포 종료시 ... 팬 흐름의 실 당겨 방지 기능, DesktopRobot의 리턴 제어 (양과 속도) 대기 시간을 설정합니다. | ||||||||
| Desktop Robot의 특징 | ||||||||
| 고 강성 구조와 마이크로 스텝 제어에 의한 고정밀도의 위 치 반복 정밀도 (X, Y, Z 축 모두, ± 0.01 ·)과 진동이 적은 매끄러운 움직임이 도포 장치에 적합합니다. 베이스 부분은 일체형 구조의 알루미늄 합금 주물을 기둥 구조 부에는 강성이 높은 단면 형상을 갖는 알루미늄 압출재를 채용했습니다. 라비린스 (미궁) 구조로 본체 내부에 이물질 (나사 · 용제 · 용액 · 쓰레기 등)이 끼어 걱정이 없습니다. | ||||||||
| 기본 사양 | ||||||||
| FDH3000mp-J22 | FDH3000mp-J23 | FDH3000mp-J24 | ||||||
| 로봇 | 로봇동작범위 | X 축 · Y 축 | 200mm×200mm | 300mm×320mm | 400mm×400mm | |||
| Z 축 | 50mm50mm | 100mm100mm | 150mm150mm | |||||
| 도포동작범위 (참고) * 1 | X 축 · Y 축 | 165mm×130mm | 300mm×250mm | 350mm×350mm | ||||
| Z 축 | 43mm | 68mm | 118mm | |||||
| 최대가반질량 * 2 | ワ?ク워크 | 7kg | 11kg | 11kg | ||||
| 도구 | 3.5kg | 6kg | 6kg | |||||
| 최고속도 (PTP) * 3 | X 축 · Y 축 | 500mm/sec (5 ~ 500mm/sec) | 800mm/sec (8 ~ 800mm/sec) | 800mm/sec (8 ~ 500mm/sec) | ||||
| Z 축 | 250mm/sec (2.5~250mm/sec) | 320mm/sec (3.2~320mm/sec) | 320mm/sec (3.2~320mm/sec) | |||||
| 최고속도 (CP) * 4 | X · Y · Z의총 | 500mm/sec (0.1~500mm/sec) | 800mm/sec (0.1~800mm/sec) | 800mm/sec (0.1~500mm/sec) | ||||
| 위치반복정밀도 | X 축 · Y 축 · Z 축 | ±0.01mm | ±0.01mm | ±0.01mm | ||||
| 외형치수 | 320×380×540(mm) | 560×530×650(mm) | 590×630×800(mm) | |||||
| 본체질량 | 18kg | 35kg | 42kg | |||||
| 위치교시방식 | 원격티팅 (JOG), 수치입력 (MDI) | |||||||
| 티체제 | JR C-Points 소프트와도포사양메모리카드및설정용 플로피디스크공급 | |||||||
| 티팅형태 | PC에의한오프라인티팅 (옵션) | |||||||
| 프로그램수 / 포인트기억수 | 255 프로그램 / 최대 30,000 포인트 * 5 | |||||||
| 구동방식 / 제어방식 | 5 상펄스모터 / PTP 제어, CP 제어 | |||||||
| 보간기능 | 3 차원직선보간, 3 차원원호보간 | |||||||
| 외부인터페이스 | RS232C 2ch (PC 용 1ch, 티팅펜던트전용 1ch) 외부기기용 1ch (옵션) | |||||||
| 외부입출력 | 입력 16 점, 출력 16 점 (HV3000mp와의접속용) / (입력 24 점 : 출력 24 점 : 옵션) | |||||||
| 간이 PLC 기능 | 100 프로그램 1000 스텝 / 1 프로그램 | |||||||
| 팬흐름 | 적용유체 | 5 만 CPS ~ 반죽까지대응가능 (일반적그리스, 일액형에폭시등) | ||||||
| 탑재주사기용량 | 5cc, 10cc, 30cc, 50cc | |||||||
| 제어방식 | 소프트웨어서보제어 / LCD 디지털시간제 | |||||||
| 조건설정 · 기억용량 | LCD와시트스위치에의한수치설정 / 16 종류의토출조건기억 | |||||||
| 가압조정 · 설정 | 수동조정 · 동기가압 / 상시가압 | |||||||
| 입출력 | 무접점입출력 / RS232 · RS422 무수통신방식 | |||||||
| 외형치수 / 질량 | 폭 260 × 100 × 200 (mm) / 3.0kg | |||||||
| 전원 / 전원용량 | AC90 ~ 132V · AC180 ~ 250V (단상) / 233VA | |||||||
| 사용주위온도 / 상대습도 | 0 ~ 40 ℃ / 20 ~ 95 % (비응축) | |||||||
| 부속품 | 메모리카드 (도포사양) / PC 소프트간이판 (도포사양) 설정디스켓 / 펌프피팅 HV3000mp 연결케이블 / PC 연결케이블 / 사용설명서세트 | |||||||
| 옵션 | PC 소프트 (가변모드기능) 티팅펜던트 * 6 / 테이블 | |||||||
| * 1 도포 작동 범위는 옵션 테이블을 설치 한 경우의 참고치입니다. *2 도구의 가반 질량은 펌프 세트 고정 상태입니다. *3 속도 설정 범위 *4 구동 조건에 따라 제한이 있습니다. *5 포인트 데이터 포인트 속성 데이터 포인트 작업 데이터 시퀀스 데이터 저장 공간을 공유하고 있기 때문에, 이러한 데이터가 증가하면 포인트 데이터의 최대 저장 수는 감소합니다. *6 티 팅 펜던트는 유지 보수 기능과 자세한 오류 표시 내용을 확인할 때 필요합니다. ※ Desktop Robot은 자노 메 미싱 공업 (주) 님의 상품입니다. HV3000mp는 RoHS 규제에 미 대응입니다. ※ 제품 개선을 위해 사양을 변경할 수 있기 때문에 양해 해주십시오. | ||||||||
- 이전글고점도 용 디스펜서 GV7000mp-K127 23.02.15
- 다음글자동 급유 장치 > RF-01 23.02.15