Orbray 소형 모터 > 모터 유닛 > 로봇 관절용 서보 모터
페이지 정보

본문

로봇 관절용 서보 모터Micro Robot Servo

 |
【기술 사양】
|
사람과 로봇의 공존이 눈앞에 다가온 현재, 다양한 소형 로봇이 출현하고 있습니다. 사람 대신 작업을 하거나 사람과의 대화, 방의 감시, WEB와의 접속에 의한 정보 제공 등 소형 로봇의 활약의 장소는 확실히 크게 퍼지고 있습니다.
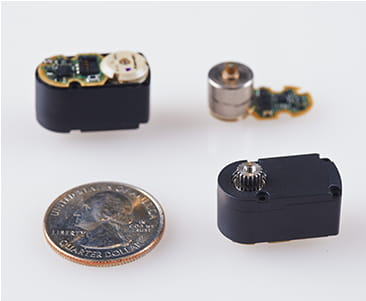
당사에서는 소형 로봇에 특화된 소형 서보를 개발하였습니다. 로봇의 관절에 적합한 구조로 하기 때문에, 한정된 스페이스 안에 구동용 모터, 기어등의 각 파트를 치밀하고 최적인 레이아웃으로 배치해, 선례가 없는 소형화를 실현했습니다. 또, 소형 로봇의 사용 방법을 의식하면서, 제품의 신뢰성을 확보하기 위한 신기술로서, 외부로부터 예상외의 부하가 걸렸을 경우에 그 힘을 놓치기 위한 「초소형 클러치 기구(토크) 리미터)」, 내구성 향상과 정밀한 동작을 실현하기 위한 「비접촉 포텐쇼미터」, 「φ10 브러시리스 모터」를 탑재 했습니다 .
당사는 모터뿐만 아니라 주변기구를 포함한 토탈 솔루션의 제안을 실시하여 고객의 제품 개발에 공헌하고 있습니다.
※판매 가능합니다. 영업 창구까지 상담해 주십시오.
특징
소형?저소음 |
로봇 관절에 특화된 특수 구조 |
|
|
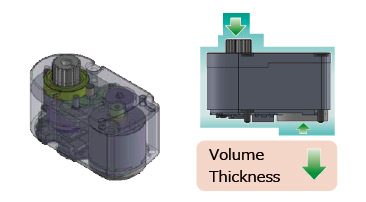
소형 스텝 정렬 구조 기어 재질, 모듈, 안전율 최적화 ?업계 최소 사이즈 실현?독자적인 고정밀 감속기 구조로 대폭적인 소음 저감 달성 |
원형 아치 모양의 소형, 얇은 서보 구조 스마트한 로봇 디자인을 가능하게 |
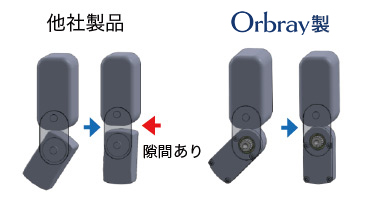
클러치 메커니즘 |
비접촉식 전위차계 |
?백래시≒0°?뛰어난 내구성출력축에 장착된 클러치가 과도한 부하로부터 내부 기어를 보호. 안전성도 확보. |
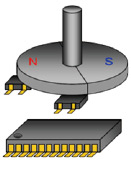 두께 : 0.38mm |
로봇 관절용 서보 모터 채용 실적
 |
샤프 주식회사가 판매하고 있는 모바일형 로봇 전화 「로보폰」용으로 소형 서보 모터를 개발했습니다. 「로보폰」의 귀여운 동작과 복잡한 동작, 리드미컬한 댄스는 총 13개의 소형 서보 모터에 의해 구동되고 있습니다.서보의 설계는 로봇의 각 관절에 적합한 구조로 하기 때문에, 한정된 스페이스 안에 구동용 모터, 기어 등의 각 파트를 치밀하고 최적화한 레이아웃으로 배치해 모바일형 로봇에 적합한 소형화를 실현되었습니다. 게다가 제품의 신뢰성을 확보하기 위한 신기술로서 외부로부터 예상외의 부하가 걸렸을 경우에 그 힘을 놓치기 위한 「클러치 기구(토크 리미터)」와 내구성 향상을 위한 「비접촉의 포텐쇼미터 +φ10 브러시리스 모터」를 탑재했습니다. Orbray는 모터뿐만 아니라 주변 부품을 포함한 토탈 솔루션을 제안하여 고객의 제품 개발에 기여할 것입니다. ※「로보폰」「RoBoHoN」은 샤프 주식회사의 등록상표입니다. |
클러치 기능 소개 동영상
- 이전글소형 모터 > DC 코어리스 모터 > 모터 드라이버 23.04.25
- 다음글소형 모터 > 모터 유닛 > 다이어프램 펌프 23.04.25